


更多相關(guān)產(chǎn)品
- LGGY-BL02X型桌面六軸機器人拆裝套件
- LGGY-BL01X型桌面六軸機器人實訓設(shè)備
- LGZN-SZ02L型智能制造數(shù)字孿生虛擬仿真實訓室
- LGGY-DS23型大田耕種機器人實訓裝置
- LGGY-DS22型物理除草機器人實訓裝置
- LGGY-DS21型大田作業(yè)機器人實訓裝置
- LGGY-DS20型果園噴霧機器人實訓裝置
- LGGY-DS19型果園采摘機器人實訓裝置
- LGGY-DS18型果園應(yīng)用開發(fā)通用平臺實訓裝置
- LGGY-DS17型智能割草機器人實訓裝置
- LGGY-DS16型雙臂復合機器人實訓裝置
- LGGY-DS15型七自由度機械臂實訓裝置
- LGGY-DS14型六自由度機械臂套件實訓裝置
- LGGY-DS13型具身復合機器人創(chuàng)新設(shè)計套裝實訓裝置(增強版)
- LGGY-DS12型便攜式ROS導航機器人學習平臺實訓裝置
- LGGY-DS11型基于大模型的智慧零售平臺實訓裝置
- LGGY-DS10型農(nóng)業(yè)智能車實訓裝置
- LGGY-DS09型智能服務(wù)機器人實訓裝置
- LGGY-DS08型ROS基礎(chǔ)教學智能車實訓裝置
- LGGY-DS07型視覺語音智能車實訓裝置
- LGGY-DS06型人形機器人實訓裝置
- LGGY-DS05型6足18自由度圓形仿生機器人實訓裝置
- LGGY-DS04型無人駕駛深度學習智能車實訓裝置
- LGGY-DS03型商服機器人-機械臂版及場地實訓裝置
- LGGY-DS02型計算機視覺平臺實訓裝置
- LGGY-DS01型智能汽車及賽道實訓裝置
- LGGY-Z08型智能制造綜合產(chǎn)線
- LGGY-SJ03型機器人視覺分揀螺母工作站實訓系統(tǒng)
- LGGY-WH05型工業(yè)機器人維護維修基礎(chǔ)教學工作站
- LGGY-F6A型服務(wù)機器人應(yīng)用技術(shù)實訓平臺
- LGGY-K50型工業(yè)機器人應(yīng)用工作站
- LGGY-R04型工業(yè)機器人一體化實訓平臺
- LGGY-R02B型智能生產(chǎn)線運行與維護綜合實訓裝置
- LGGY-T03A型智能制造單元系統(tǒng)集成應(yīng)用平臺
- LGGY-W01A型工業(yè)機器人應(yīng)用工作站
- LGGY-S2型工業(yè)機器人與智能視覺系統(tǒng)應(yīng)用實驗平臺
- LG-MPS02型模塊化柔性自動化生產(chǎn)線實訓系統(tǒng)(八站)
- LGJ-IMS03型工業(yè)機器人模塊化智能生產(chǎn)線實訓系統(tǒng)
- LGJ-KY02型智能機器人智能制造綜合實操工作站
- LGJ-QBJ01型工業(yè)機器人模擬汽車領(lǐng)金沖壓集成制造實訓系統(tǒng)
LGGY-BL01X型桌面六軸機器人實訓設(shè)備
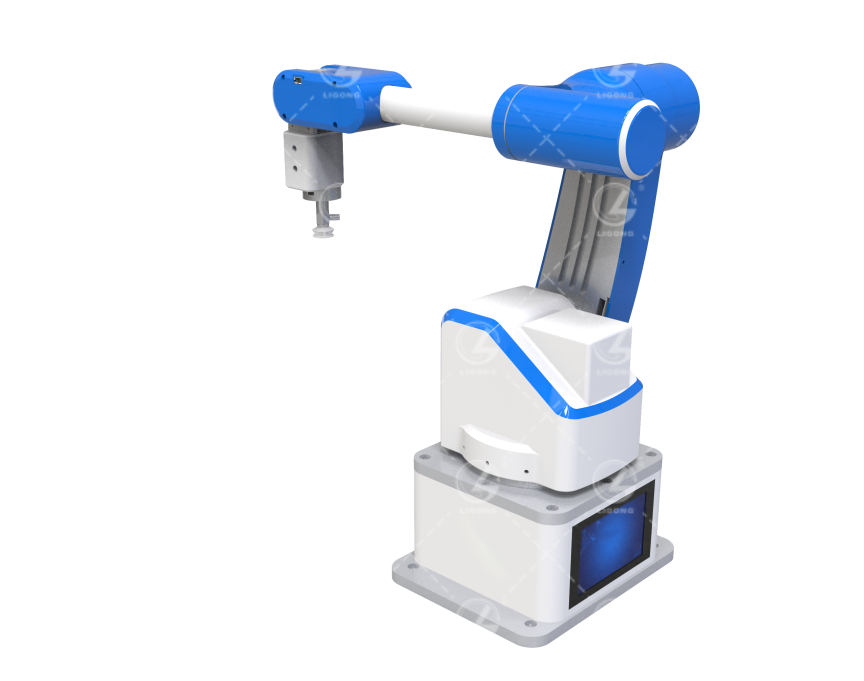

一、產(chǎn)品概述
該桌面六軸機器人是專為教學開發(fā)的一款產(chǎn)品,完全開放機器人結(jié)構(gòu)設(shè)計、電機控制和運動學控制算法,融合開源AI大模型技術(shù)。同時,提供多個拓展接口,支持視覺、語音、傳感器等外設(shè)模塊的接入,滿足多場景的硬件開發(fā)需求。

二、產(chǎn)品功能和特點
1、控制完全開源
在結(jié)構(gòu)設(shè)計上,可提供3D模型設(shè)計圖;在電機控制上,開放電機、控制器與機器人關(guān)節(jié)之間的控制源碼;在運動學算法上,開放底層運動學正逆解模型的源碼。通過全方位的開源,用戶可以從事機器人軟硬件層面的各類科研、開發(fā)工作。
2、視覺感知能力
機器人不僅可以與傳統(tǒng)2D視覺進行協(xié)同,還融合了深度視覺技術(shù),從而實現(xiàn)了雙重視覺感知與協(xié)同作業(yè)。因此,不僅大幅提升了機器人的環(huán)境理解與定位精度,還使其能夠處理更為復雜的作業(yè)場景。通過深度視覺,機器人能更準確地識別物體形狀、距離及姿態(tài),從而執(zhí)行更精細的操作任務(wù),極大地增強了其應(yīng)用價值與靈活性,推動了自動化技術(shù)的革新。
3、融合AI大模型
機器人與開源AI大模型深度融合,通過AI大模型訓練機器人的SDK,機器人可以自主編寫代碼并執(zhí)行動作。同時,還提供AI大模型自主訓練的全流程技術(shù),包括融合視覺、語音等傳感器,讓用戶能夠根據(jù)應(yīng)用場景對模型進行數(shù)據(jù)收集、模型訓練、驗證和部署。
4、支持無線遙操作
機器人搭載開源的遙操作系統(tǒng),相對于傳統(tǒng)的機器人控制方法,遙操作系統(tǒng)構(gòu)建了真實可靠的人機交互場景,具有高精度運動跟隨、實時動態(tài)力反饋、安全和易操作等特點,在遠程醫(yī)療、遠程服務(wù)、空間探測等領(lǐng)域有廣泛的應(yīng)用場景。
產(chǎn)品可以開放遙操作手柄的傳感器數(shù)據(jù)采集、與機器人的通信及運動控制SDK的調(diào)用等核心技術(shù),滿足用戶的深入學習和研究的需求。
三、技術(shù)參數(shù)
1. 軸數(shù):6
2. 最大負載:1kg
3. 工作半徑:410mm
4. 自重:4.8KG
5. 重復定位精度:±0.1mm
6. 供電電壓:12V/5A DC
7. 額定功率:60W Max
8. 材質(zhì):鋁合金、高韌性樹脂
9. 工作環(huán)境:-10℃~40℃
10. 控制器:STM32
11. 通信方式:USB/WiFi/Bluetooth/RJ45
12. 控制方式:PC端軟件、無線示教器、語音控制
13. 底座尺寸:170mm×135mm
14. 軸運動參數(shù)(負載500g時):
J1: ±130°,最大速度:45°/s
J2: -80°~+90°,最大速度:45°/s
J3: -85°~+40°,最大速度:45°/s
J4: -160°~+160°,最大速度:45°/s
J5: -192°~+15°,最大速度:27°/s
J6: ±179°,最大速度:45°/s
四、可適配套件
1.華為昇騰處理器
2.2D視覺套件
3.深度視覺套件
4.語音識別套件
5.傳送帶套件
6.機器人滑軌套件
7.PLC套件
8.無線遙操作套件
9.移動機器人套件
五、教學項目與配套課程
1、ROS機器人操作系統(tǒng)
(1)ROS操作系統(tǒng)配置
(2)ROS功能包的創(chuàng)建及編譯
(3)ROS消息與服務(wù)
(4)ROS消息發(fā)布器與訂閱器
(5)服務(wù)器與客戶端
(6)話題消息的定義與使用
(7)ROS在多機器人上的使用
2、機器人運動學
(1)機器人系統(tǒng)認識
(2)機器人空間位姿描述
(3)建立連桿坐標系及D-H參數(shù)
(4)機器人正運動學
(5)機器人逆運動學
(6)機器人關(guān)節(jié)空間規(guī)劃
(7)機器人笛卡爾空間規(guī)劃
(8)機器人雅可比矩陣
(9)機器人動力學
(10)機器人動力學參數(shù)辨識
(11)機器人的拖動示教
(12)基于末端力矩傳感器的拖動示教實驗
3、機器人基礎(chǔ)操作
(1)六軸機器人多機械結(jié)構(gòu)認知
(2)六軸機器人坐標變換
(3)六軸機器人六軸聯(lián)動控制
(4)六軸機器人示教編程控制
(5)六軸機器人軌跡路徑編程
4、機器視覺(需配置視覺系統(tǒng))
(1)視覺系統(tǒng)認知
(2)物體定位和角度測量
(3)邊緣長度測量與面積檢測
(4)物體顏色和形狀識別
(5)條碼和二維碼識別
(6)OCR字符分割與識別
(7)基于形態(tài)學處理的產(chǎn)品表面缺陷檢測
(8)車牌識別
(9)基于模板匹配的電子產(chǎn)品識別
5、基于視覺的機器人應(yīng)用(需配置視覺系統(tǒng))
(1)六軸機器人認知和基礎(chǔ)操作
(2)六軸機器人與視覺系統(tǒng)標定
(3)基于視覺的六軸機器人目標分類
(4)基于視覺的六軸機器人物體碼垛
(5)基于視覺的六軸機器人數(shù)字排序
(6)基于視覺的六軸機器人水果分類