


產(chǎn)品分類(lèi)
更多相關(guān)產(chǎn)品
- LGGY-BL03X型六軸協(xié)作機(jī)器人實(shí)訓(xùn)設(shè)備
- LGGY-BL02X型桌面六軸機(jī)器人拆裝套件
- LGGY-BL01X型桌面六軸機(jī)器人實(shí)訓(xùn)設(shè)備
- LGZN-SZ02L型智能制造數(shù)字孿生虛擬仿真實(shí)訓(xùn)室
- LGGY-DS23型大田耕種機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS22型物理除草機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS21型大田作業(yè)機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS20型果園噴霧機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS19型果園采摘機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS18型果園應(yīng)用開(kāi)發(fā)通用平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS17型智能割草機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS16型雙臂復(fù)合機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS15型七自由度機(jī)械臂實(shí)訓(xùn)裝置
- LGGY-DS14型六自由度機(jī)械臂套件實(shí)訓(xùn)裝置
- LGGY-DS13型具身復(fù)合機(jī)器人創(chuàng)新設(shè)計(jì)套裝實(shí)訓(xùn)裝置(增強(qiáng)版)
- LGGY-DS12型便攜式ROS導(dǎo)航機(jī)器人學(xué)習(xí)平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS11型基于大模型的智慧零售平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS10型農(nóng)業(yè)智能車(chē)實(shí)訓(xùn)裝置
- LGGY-DS09型智能服務(wù)機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS08型ROS基礎(chǔ)教學(xué)智能車(chē)實(shí)訓(xùn)裝置
- LGGY-DS07型視覺(jué)語(yǔ)音智能車(chē)實(shí)訓(xùn)裝置
- LGGY-DS06型人形機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS05型6足18自由度圓形仿生機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS04型無(wú)人駕駛深度學(xué)習(xí)智能車(chē)實(shí)訓(xùn)裝置
- LGGY-DS03型商服機(jī)器人-機(jī)械臂版及場(chǎng)地實(shí)訓(xùn)裝置
- LGGY-DS02型計(jì)算機(jī)視覺(jué)平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS01型智能汽車(chē)及賽道實(shí)訓(xùn)裝置
- LGGY-Z08型智能制造綜合產(chǎn)線
- LGGY-SJ03型機(jī)器人視覺(jué)分揀螺母工作站實(shí)訓(xùn)系統(tǒng)
- LGGY-WH05型工業(yè)機(jī)器人維護(hù)維修基礎(chǔ)教學(xué)工作站
- LGGY-F6A型服務(wù)機(jī)器人應(yīng)用技術(shù)實(shí)訓(xùn)平臺(tái)
- LGGY-K50型工業(yè)機(jī)器人應(yīng)用工作站
- LGGY-R04型工業(yè)機(jī)器人一體化實(shí)訓(xùn)平臺(tái)
- LGGY-R02B型智能生產(chǎn)線運(yùn)行與維護(hù)綜合實(shí)訓(xùn)裝置
- LGGY-T03A型智能制造單元系統(tǒng)集成應(yīng)用平臺(tái)
- LGGY-W01A型工業(yè)機(jī)器人應(yīng)用工作站
- LGGY-S2型工業(yè)機(jī)器人與智能視覺(jué)系統(tǒng)應(yīng)用實(shí)驗(yàn)平臺(tái)
- LG-MPS02型模塊化柔性自動(dòng)化生產(chǎn)線實(shí)訓(xùn)系統(tǒng)(八站)
- LGJ-IMS03型工業(yè)機(jī)器人模塊化智能生產(chǎn)線實(shí)訓(xùn)系統(tǒng)
- LGJ-KY02型智能機(jī)器人智能制造綜合實(shí)操工作站
LGGY-BL02X型桌面六軸機(jī)器人拆裝套件
一、產(chǎn)品概述
六軸機(jī)器人在結(jié)構(gòu)原理上,涵蓋了機(jī)械設(shè)計(jì)、電機(jī)控制、電路設(shè)計(jì)與通訊等多個(gè)學(xué)科。在組裝一臺(tái)完整的工業(yè)級(jí)六軸機(jī)器人的過(guò)程中,學(xué)生需要考慮到每一個(gè)細(xì)節(jié),從底座固定、關(guān)節(jié)連接,到電纜布線、電控系統(tǒng)安裝等,這些精細(xì)化的操作不僅要求學(xué)生能把控安裝和測(cè)試的全過(guò)程,還能夠有效的加深其對(duì)機(jī)械結(jié)構(gòu)、電路連接、運(yùn)動(dòng)控制等知識(shí)的理解,進(jìn)而培養(yǎng)其良好的實(shí)踐意識(shí)和解決問(wèn)題的能力。
二、產(chǎn)品特點(diǎn)
1、機(jī)械結(jié)構(gòu)與機(jī)械設(shè)計(jì)
多軸運(yùn)動(dòng)學(xué)原理:了解機(jī)器人的六個(gè)自由度和不同關(guān)節(jié)軸的運(yùn)動(dòng)特點(diǎn),掌握各關(guān)節(jié)之間的關(guān)系及其如何實(shí)現(xiàn)復(fù)雜的空間定位。傳動(dòng)機(jī)構(gòu)原理:學(xué)習(xí)機(jī)器人中的傳動(dòng)結(jié)構(gòu)(如減速器、齒輪和驅(qū)動(dòng)軸),了解如何通過(guò)傳動(dòng)結(jié)構(gòu)實(shí)現(xiàn)精確運(yùn)動(dòng)控制。關(guān)節(jié)設(shè)計(jì)與結(jié)構(gòu)分析:熟悉各關(guān)節(jié)的設(shè)計(jì)原理,了解基本動(dòng)作的實(shí)現(xiàn)方式,掌握各關(guān)節(jié)在負(fù)載和靈活性方面的優(yōu)化。機(jī)器人末端執(zhí)行器的選用與更換:學(xué)習(xí)如何選擇適當(dāng)?shù)哪┒藞?zhí)行器(如夾具、吸盤(pán)等)以適應(yīng)不同任務(wù)需求,以及末端執(zhí)行器的安裝和調(diào)整方法。
2、電機(jī)控制與電氣系統(tǒng)
步進(jìn)電機(jī)控制:了解步進(jìn)電機(jī)的特點(diǎn)及其在機(jī)器人中的應(yīng)用,學(xué)習(xí)如何通過(guò)控制電機(jī)的轉(zhuǎn)速和位置來(lái)實(shí)現(xiàn)精準(zhǔn)的關(guān)節(jié)控制。電氣接線與布線技巧:掌握機(jī)器人內(nèi)部復(fù)雜電纜的布線方法,學(xué)習(xí)如何設(shè)計(jì)和整理布線,以防止線纜拉扯、干擾或磨損。電氣連接與電源管理:學(xué)習(xí)電氣元件連接的基本方法,包括電機(jī)、電路板、傳感器等的接線規(guī)范,了解如何分配電源以確保系統(tǒng)穩(wěn)定運(yùn)行。
3、控制系統(tǒng)與傳感器應(yīng)用
控制系統(tǒng)架構(gòu):了解機(jī)器人的控制系統(tǒng)構(gòu)成,包括主控板、電機(jī)驅(qū)動(dòng)器、控制算法和電機(jī)控制信號(hào)的傳輸。反饋與閉環(huán)控制:通過(guò)位置傳感器(編碼器)獲取關(guān)節(jié)位置反饋,掌握如何通過(guò)閉環(huán)控制實(shí)現(xiàn)對(duì)關(guān)節(jié)精確的實(shí)時(shí)控制。
4、編程與算法實(shí)現(xiàn)
運(yùn)動(dòng)控制編程:學(xué)習(xí)控制機(jī)器人運(yùn)動(dòng)的基本指令,通過(guò)程序?qū)崿F(xiàn)復(fù)雜的運(yùn)動(dòng)路徑、速度調(diào)整和末端精確定位。多軸協(xié)調(diào)與同步控制:編程實(shí)現(xiàn)六個(gè)關(guān)節(jié)的協(xié)調(diào)控制,使機(jī)器人在不同關(guān)節(jié)同時(shí)運(yùn)動(dòng)時(shí)保持流暢無(wú)誤差。自動(dòng)化任務(wù)編程:將一系列運(yùn)動(dòng)指令編程化,以完成自動(dòng)化組裝或搬運(yùn)等任務(wù),練習(xí)自動(dòng)化任務(wù)的設(shè)計(jì)和實(shí)現(xiàn)。
5、系統(tǒng)調(diào)試與故障排查
機(jī)械與電氣故障排查:學(xué)習(xí)調(diào)試機(jī)器人的方法,包括對(duì)各關(guān)節(jié)、電機(jī)、傳感器、電路連接等可能出現(xiàn)的故障進(jìn)行診斷和排查。調(diào)試與校準(zhǔn)技術(shù):了解機(jī)器人各關(guān)節(jié)零位和運(yùn)動(dòng)范圍的調(diào)試方法,通過(guò)手動(dòng)和程序化的方式進(jìn)行初始校準(zhǔn),確保每個(gè)關(guān)節(jié)的精度和穩(wěn)定性。
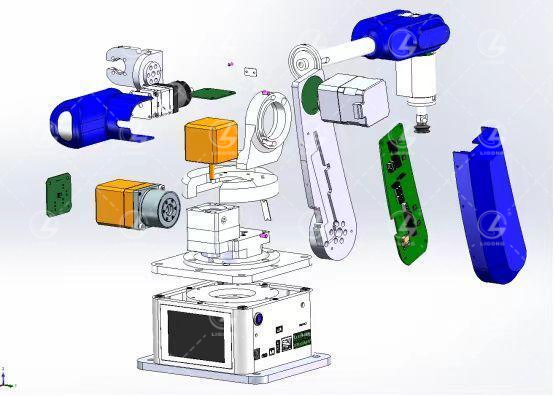
三、產(chǎn)品結(jié)構(gòu)組成
1、結(jié)構(gòu)件
整機(jī)結(jié)構(gòu)件包含基座、支撐桿、固定板等多個(gè)種類(lèi),統(tǒng)一采用高強(qiáng)度鋁制材料,為機(jī)器人的高性能工作狀態(tài)提供強(qiáng)有力的質(zhì)量支撐。
2、電機(jī)組件
包含各軸電機(jī)及傳動(dòng)裝置,具備低噪音、高效能的特點(diǎn),使得機(jī)器人末端最大負(fù)載能力達(dá)1kg以上。
3、電路控制板
作為機(jī)器人的“大腦”,電路控制板負(fù)責(zé)接收指令、處理數(shù)據(jù)、控制電機(jī)等關(guān)鍵任務(wù)。控制板集成了先進(jìn)的控制算法和多個(gè)外部接口,能夠?qū)崿F(xiàn)對(duì)機(jī)器人運(yùn)動(dòng)的精確控制和拓展應(yīng)用。
4、電氣組件
除了以上結(jié)構(gòu)件和組件外,機(jī)器人集成了一鍵開(kāi)關(guān)、氣泵等電氣組件,實(shí)現(xiàn)機(jī)器人在多場(chǎng)景下進(jìn)行復(fù)雜作業(yè)的需求。
5、外觀結(jié)構(gòu)
采用3D打印的高韌性樹(shù)脂材料,其輕便、耐用的特性符合機(jī)器人對(duì)輕量化和耐用性的要求。
四、產(chǎn)品組裝步驟
1、準(zhǔn)備階段
(1)確保所有結(jié)構(gòu)件和組件齊全,檢查無(wú)損壞或缺失。
(2)準(zhǔn)備好扳手、十字螺絲刀、六角扳手、扭力扳手、防靜電手環(huán)、清潔布等工具。
(3)閱讀組裝指南,熟悉各部件名稱(chēng)與功能。
2、機(jī)器人組裝步驟
第1步:組裝機(jī)器人底座
第2步:安裝第1軸電機(jī)與支撐底座
第3步:安裝第2軸關(guān)節(jié)及電機(jī)
第4步:安裝第3軸關(guān)節(jié)及電機(jī)
第5步:安裝第4軸關(guān)節(jié)及電機(jī)
第6步:安裝5軸和6軸組件
第7步:組裝氣泵模塊
第8步:組裝底板模塊
第9步:安裝三四軸側(cè)板
第10步:安裝五、六軸尾板
3、機(jī)器人上電與零位校準(zhǔn)
機(jī)器人組裝完畢后,接通電源,在底座的觸摸屏中打開(kāi)如下關(guān)節(jié)校準(zhǔn)界面,按照步驟對(duì)第1軸~第6軸進(jìn)行校準(zhǔn)。
4、安裝機(jī)器人外殼
至此,機(jī)器人全部組裝完畢,可以開(kāi)展其他應(yīng)用和開(kāi)發(fā)工作。